 400-099-1872
400-099-1872





多智能体自主协同方案
实验室建设
(基于E-PUCK2微型地面群体智能协作系统实验室建设)
实验室建设
(基于E-PUCK2微型地面群体智能协作系统实验室建设)
项目类型:《多智能体自主协同技术》
项目名称:多智能体分布式群体协作系统
项目编号:ZNJ-MAS_2020
制作单位:北京智能佳科技有限公司
目 录
一、 实验室建设目的
二、 技术背景
三、 实验室概况
四、 应用领域
五、 研究方向
六、 基于E-PUCK发表核心期刊
七、 项目效益
八、 群体智能协同系统
九、 配置方案及报价
十、 群体智能软件案例
十一、 多智能体实验室效果图
10.1 群体智能实验平台效果图
10.2 群体智能实验平台三视图
10.3 实验室整体效果图
10.4 群体智能实验室刨面图
10.5 多智能体协同效果图
10.6 多智能体协同效果图
一、 实验室建设目的
二、 技术背景
三、 实验室概况
四、 应用领域
五、 研究方向
六、 基于E-PUCK发表核心期刊
七、 项目效益
八、 群体智能协同系统
九、 配置方案及报价
十、 群体智能软件案例
十一、 多智能体实验室效果图
10.1 群体智能实验平台效果图
10.2 群体智能实验平台三视图
10.3 实验室整体效果图
10.4 群体智能实验室刨面图
10.5 多智能体协同效果图
10.6 多智能体协同效果图
一、 实验室建设目的
近些年来,由于仿生学、计算机科学、人工智能、控制科学、社会学等多个学科交叉和渗透发展,多智能体协同控制技术越来越受到众多学校的广泛关注,已成为当前控制学科以及人工智能领域的研究热点。构建一套前沿技术和应用前景广泛的群体智能教学与实训平台,不仅能够很好的实现如编队控制、一致性控制、聚散控制等多智能体协同控制算法,打造国际一流水准的群体智能机器人试验平台,也是学校注重理论和实践相结合的培养学生综合素质以及实践动手能力的主要方式,是传播和产生更多科技新知识建立科学实验与创新的实验基地。
二、 技术背景
多智能体协同控制的发展从集中、集散式控制、现场中心控制、智能控制,日益复杂化、智能化,且具备了智能体(Agent)的基本特征,控制方式日益走向多智能控制单元协同工作的模式,整个控制系统已经具备了多智能体系统(Multi-Agent System, MAS)的雏形,基于多智能体的分布式协同系统是现代智能控制技术发展的方向。近年来国内外高校对多智能体协同技术研究日益增多。
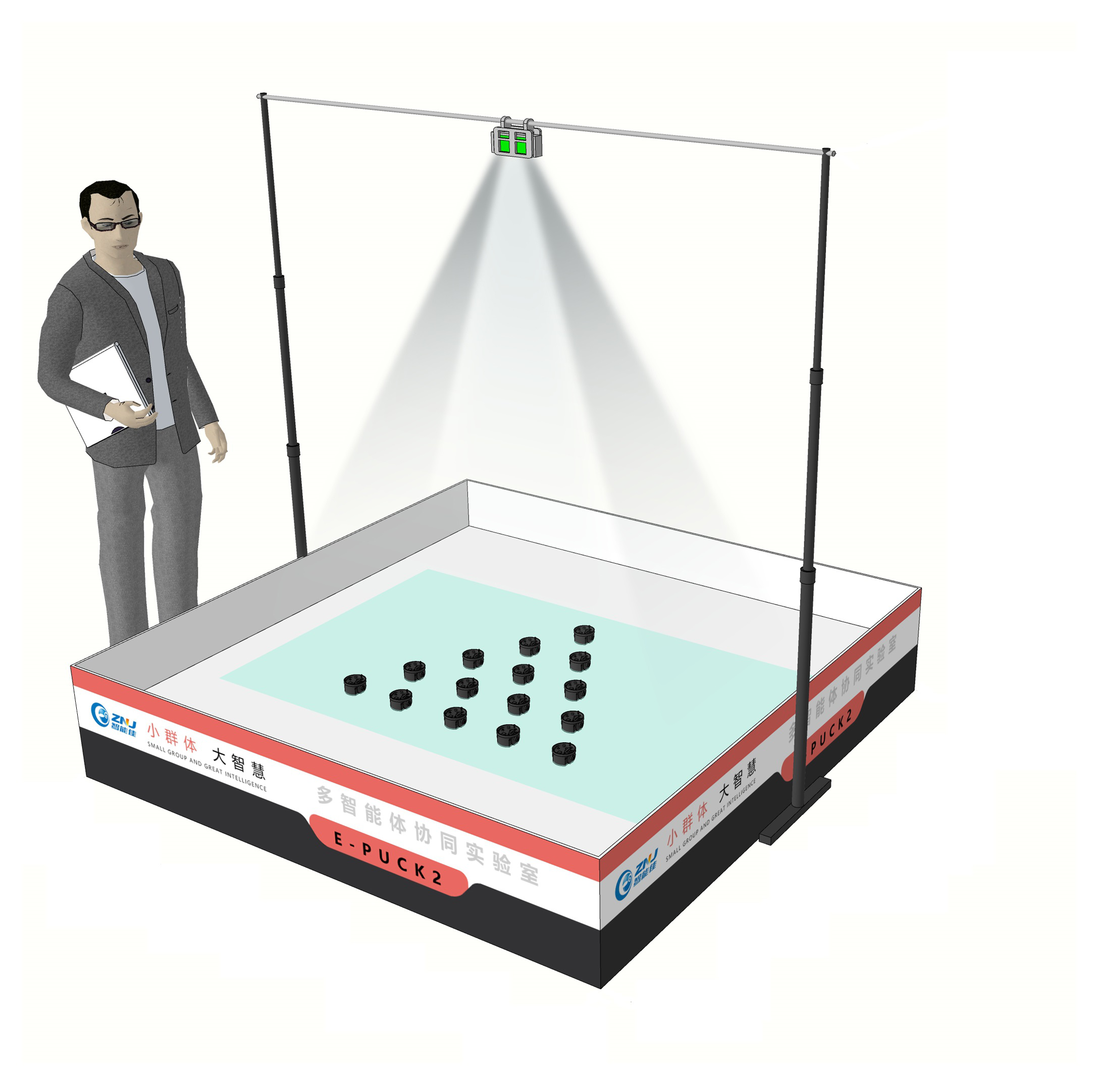
三、 实验室概况
本实验室通过采用E-puck2桌面型群体智能机器人,在小型实验场地内通过光电投影定位技术实现机器人位置感知和数据通讯,实现“群体智能”研究目标。该套实验平台能够为项目研究算法提供较为充足的研究条件,及软、硬件开发环境支撑,可以实现涵盖单体智能控制、多智能体协同控制、网络通讯、协同算法等领域的相关技术内容,以及验证多智能体协同控制理论和关键技术解决方案,为现实生活中大规模活动与个体之间关系提供实验模型和理论验证。
四、 应用领域
群体智能机器人是一种国际前沿的人工智能研究项目,由多个小型机器人组成的集群式解决系统。群体智能机器人的灵感源于蚂蚁、蜜蜂、鱼群体等生物,在没有统一领导的情况下,也能合作执行大量复杂的任务。群体智能机器人的原理是,首先由一批智能小机器人,先让它们完成简单的任务,比如组建一个图形,再在此基础上一步叠加复杂的任务,最终实现整个人工智能的突破,无限接近、甚至超越人类。每一个小机器人都具有自身的运动能力和有限的智能水平,通过个体之间或个体与环境之间交互行为形成高度的有组织性活动,虽然这些交互行为看上去非常简单,但他们聚在一起却能解决一些难题,完成很多单体无法完成的工作。群体智能机器人的运用前景非常广泛,包括智慧城市、智慧医疗、智能制造等方面,在军事战略中也发挥巨大作用。
五、 研究方向
在动态不可预测多智能体环境中,重点可以研究以下课题:
Ø 智能机器人运动姿态解析与控制算法的研究;
Ø 智能机器人自主感知、组网算法的研究;
Ø 多机器人目标协同定位算法的研究;
Ø 多机器人自主动态决策与路径规划算法的研究;
Ø 多机器人编队组合解散、仿生学行为模拟算法的研究等;
Ø 智能机器人运动姿态解析与控制算法的研究;
Ø 智能机器人自主感知、组网算法的研究;
Ø 多机器人目标协同定位算法的研究;
Ø 多机器人自主动态决策与路径规划算法的研究;
Ø 多机器人编队组合解散、仿生学行为模拟算法的研究等;
六、 基于E-PUCK发表核心期刊
| 序号 | 论文出处 | 课题 |
| 1 | IEEE |
Persistent and Robust Execution of MAPF Schedules in Warehouses 在仓库中连续稳定地里执行MAPF计划 |
| 2 | IEEE |
Finding Consensus Without Computation 无算法条件下自主聚集行为 |
| 3 | Natural Robotics Lab |
Occlusion-Based Cooperative Transport with a Swarm of Miniature Mobile Robots 多耦合系统下的微型轮式移动器群体协同传输 |
| 4 | Natural Robotics Lab |
Self-organized aggregation without computation 无算法条件下的自组织群集行为 |
| 5 | Natural Robotics Lab |
Clustering Objects with Robots That Do Not Compute 无算法条件下多机器人聚集行为 |
七、 项目效益
通过构建群体智能机器人研究平台,可以提升人工智能科研深度,提高学生综合能力水平,形成人工智能专业人才培养新模式、产教融合实践与服务体系以及国际交流合作新格局,建成学校满意、国内一流、国际知名的高标准科研平台。
1. 人才培养指标:以多学科交叉融合为特色综合应用平台,以创新实训为手段、以团队协作为组织模式,以培养综合知识应用为目标,每学年满足50人以上学生的学习与实训需求。
2. 经济效益指标:有效节省经费,降低教学科研成本,优化资源配置,提升教学设备的使用率和成果转化率。
3. 社会效益指标:满足师生对群体智能的学习与实训需求,支撑教师开展科学研究和教学成果展示,提升学生们的就业水平,增强社会竞争力。
4. 教学资源建设:可申请群体智能国家级精品在线开放课程,申请嵌入式多智能体协同校级“金课”等。
5. 服务满意度指标:为师生提供“随时”、“随地”、“随心”实验与实训环境,师生使用满意率达到99%。
6. 打造国际交流平台:扩大与国际教学交流,提升师资队伍国际视野,以国家“一带一路”倡议为契机,探索群体智能国际化理念,招收“一带一路”国家留学生,开发和输出人工智能专业教学标准和技术培训标准。提升人才培养国际化水平,提升国际竞争力与影响力
1. 人才培养指标:以多学科交叉融合为特色综合应用平台,以创新实训为手段、以团队协作为组织模式,以培养综合知识应用为目标,每学年满足50人以上学生的学习与实训需求。
2. 经济效益指标:有效节省经费,降低教学科研成本,优化资源配置,提升教学设备的使用率和成果转化率。
3. 社会效益指标:满足师生对群体智能的学习与实训需求,支撑教师开展科学研究和教学成果展示,提升学生们的就业水平,增强社会竞争力。
4. 教学资源建设:可申请群体智能国家级精品在线开放课程,申请嵌入式多智能体协同校级“金课”等。
5. 服务满意度指标:为师生提供“随时”、“随地”、“随心”实验与实训环境,师生使用满意率达到99%。
6. 打造国际交流平台:扩大与国际教学交流,提升师资队伍国际视野,以国家“一带一路”倡议为契机,探索群体智能国际化理念,招收“一带一路”国家留学生,开发和输出人工智能专业教学标准和技术培训标准。提升人才培养国际化水平,提升国际竞争力与影响力
八、 群体智能协同系统
群体智能协同实验平台分为高频投影仪系统、无线通讯控制系统、群体智能决策软件系统、机器人系统四大部分。
机器人是实验控制对象,是算法实现的载体;高频投影仪系统是机器人位置感知与定位的主要系统,通过高频光谱采集机器人位置、朝向、速度等数据信息;无线通讯控制系统负责上位机和机器人之间的通讯,连接数据的采集和数据的发送,使整个系统成为一个闭环。群体智能决策软件系统相当于整个系统的大脑,综合收集到的信息控制机器人之间的运动关系,经过决策后发出机器人执行的指令。
1. 高频投影仪系统
高频投影仪系统可用于三维重建、三维测量、平面定位等。三位重建和测量主要方法是通过投影仪将结构光投影至被测物体上,并通过摄像机进行拍摄,并根据三维坐标和二维坐标的转换得到其深度,而平面定位则是将经过格雷码调制过后图片序列,以高频(3000HZ及以上)形式连续播放,而接收到光信号的设备,按照格雷码编码的方式进行解码,从而求出当前所处的平面坐标。
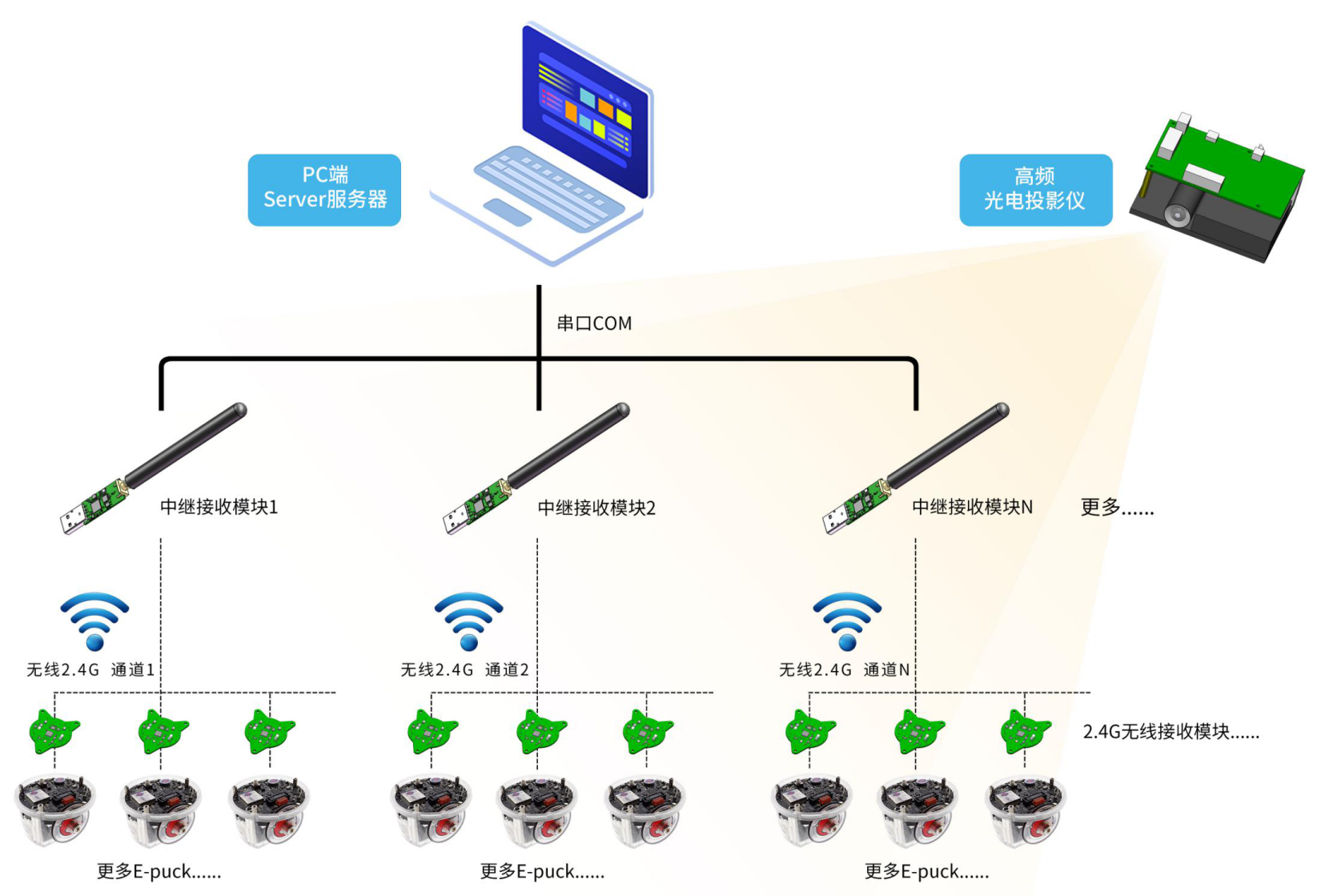
2. 无线通讯控制系统
群体智能无线通讯控制系统含单体智能无线接收模块和中继接收模块。单体智能无线接收模块含智能定位和智能组网两大部分,主要加装在微型机器人上,用于微型机器人的定位和通信。它的定位采用结构光的格雷码解码的方式,定位精度能够达到8mm。通信组网采用的是2.4GHZ射频通信技术,可以实现一对多通信,发射接收频率最大可以达到2Mb/s。中继接收模块实现一个模块管理同一频段的单体智能无线接收模块,实现一对多的通信,同时将下发和接收的信息通过USB接口给出到第三方需要处理数据的设备。
3. 群体智能决策软件系统
群体智能决策软件系统用于多机器人群体行为决策的仿真,结合通信接收中继板和单体机器人,也可实现多个智能体硬件之间的自主协作。它从系统构成分为应用层、仿真层、服务层、通信层四部分。应用层含机器人群体三种协作模式:图形模式、手绘模式、指挥棒模式、二次开发模式。仿真层含机器人节点的新增、删除,机器人的路径规划,机器人目标点设置等。服务层包含软件系统获取机器人本体的位置和状态,通讯层包含软件系统通过USB接口与中继接收板之间的通信。服务层与通讯层需要接收中继板以及机器人本体进行联调。
机器人是实验控制对象,是算法实现的载体;高频投影仪系统是机器人位置感知与定位的主要系统,通过高频光谱采集机器人位置、朝向、速度等数据信息;无线通讯控制系统负责上位机和机器人之间的通讯,连接数据的采集和数据的发送,使整个系统成为一个闭环。群体智能决策软件系统相当于整个系统的大脑,综合收集到的信息控制机器人之间的运动关系,经过决策后发出机器人执行的指令。
1. 高频投影仪系统
高频投影仪系统可用于三维重建、三维测量、平面定位等。三位重建和测量主要方法是通过投影仪将结构光投影至被测物体上,并通过摄像机进行拍摄,并根据三维坐标和二维坐标的转换得到其深度,而平面定位则是将经过格雷码调制过后图片序列,以高频(3000HZ及以上)形式连续播放,而接收到光信号的设备,按照格雷码编码的方式进行解码,从而求出当前所处的平面坐标。
2. 无线通讯控制系统
群体智能无线通讯控制系统含单体智能无线接收模块和中继接收模块。单体智能无线接收模块含智能定位和智能组网两大部分,主要加装在微型机器人上,用于微型机器人的定位和通信。它的定位采用结构光的格雷码解码的方式,定位精度能够达到8mm。通信组网采用的是2.4GHZ射频通信技术,可以实现一对多通信,发射接收频率最大可以达到2Mb/s。中继接收模块实现一个模块管理同一频段的单体智能无线接收模块,实现一对多的通信,同时将下发和接收的信息通过USB接口给出到第三方需要处理数据的设备。
3. 群体智能决策软件系统
群体智能决策软件系统用于多机器人群体行为决策的仿真,结合通信接收中继板和单体机器人,也可实现多个智能体硬件之间的自主协作。它从系统构成分为应用层、仿真层、服务层、通信层四部分。应用层含机器人群体三种协作模式:图形模式、手绘模式、指挥棒模式、二次开发模式。仿真层含机器人节点的新增、删除,机器人的路径规划,机器人目标点设置等。服务层包含软件系统获取机器人本体的位置和状态,通讯层包含软件系统通过USB接口与中继接收板之间的通信。服务层与通讯层需要接收中继板以及机器人本体进行联调。
九、 配置方案
| 序号 | 产品名称 | 图片 | 介绍 | 单价 |
| 1 |
E-PUCK 2 机器人 |
 |
E-PUCK 2为高端桌面型嵌入式机器人,可以在有限的空间内进行大数量智能机器人群体协作实验,其在实用性、稳定性、拓展性、接口开放性等方面有极大的优势。可在开展已知或未知环境下的任务动态分配研究,任务预测与任务分解研究,以及异构大规模多耦合任务研究等方面具有领先优势。E-PUCK2虽然体积小,但配有多种先进的传感器以及多种扩展接口,例如:WIFI、蓝牙、红外传感器、IMU、麦克风、扬声器、LED灯、全局摄像头、USB接口、CAN接口、串口等,内置标准的Linux运行系统,提供标准C/C++语言开发环境。 配置清单: 1. 尺寸:直径70mm,高度45mm; 2. 重量:150g; 3. 处理器:32位STEm32F407; 4. 内存:192KB; 5. 传感器: l 9轴IMU; l VGA 彩色摄像头; l 8个红外线传感器; l 距离传感器; l 4个全向麦克风; l 板内建扬声器; 6. 通讯:USB、WIFI、蓝牙; 7. 运动速度:约15cm/秒; 8. 一个5Wh 可充电锂电池; 9. 电池:3.7V,锂电池1800mAh; 10. 续航约:45分钟; 11. 适合做嵌入式多机器人协作平台。 |
|
| 可选配件 | 扩展板 PiPUCK |
 |
l 采用树莓派zero w核心处理器; l 配有micro SD; l 内置标准的Linux运行系统。 |
|
| 全局摄像头V3 |
 |
l 5M像素彩色摄像头,360°均匀像素分布的抛物面环视镜; l 分辨率:640×480; l 帧数:18fps; l 配1600 mAh锂电池; l 可以连接树莓派Zero W; l 适用于图像处理,例如斑点、颜色和物体检测。 |
||
| RGB显示板 |
 |
l 9个RGB发光二极管; l 8个红外线; l PIC18F6722微控制器(数据表); l 可以识别256个不同机器人ID号; l 每个LED彼此独立显示,既可以单独控制也可以混合变色。 |
||
| 2 | 高频定位系统 |
 |
高频定位系统包含两个子系统,光引擎系统和驱动系统,以及散热器和风扇等设备。 l 光引擎包括:红色、绿色和蓝色光谱;以及912×1140钻石像素0.45英寸WXGA DMD。光引擎在15瓦功率下功耗产生约150流明光照强度。 l 驱动系统含LED驱动电路,DLPC350 DMD控制器,电源管理电路,DVI TO RGB转换与TFP401和一个32MB闪存。 |
|
| 3 | 智能无线接收模块 |
 |
智能无线接收模块含智能定位和智能组网两部分。 l 智能定位:利用两个光电传感器调制的格雷码结构光,进行解码计算定位坐标和定位角度。 l 智能组网:内置射频通信芯片,实现机器人通讯组网。 |
|
| 4 | 中继接收板 |
 |
中继接收板是单体智能硬件模块的管理者,它能够实时查看同一频段的单体智能协作模块的状态,下发一些设置命令,它包含管理决策和智能组网两部分。管理决策对第三方设备硬件上提供USB接口,软件上提供相应的查询、连接、组网等函数接口。智能组网硬件功能与单体智能协作硬件系统保持一致。 | |
| 5 | 机器人测试场地 |
 |
Ø 平台尺寸:2x2米; Ø 摄像头支架:可调高度1.5-2米; Ø 便携式补光灯:2个; Ø 高密度板:4块1.9x1.9x0.015m; Ø 主体材质:铝合金支撑骨架; Ø 护板:8块PCB防护板; Ø PVC背景板:4张(黑色/白色); Ø 3M强力超薄双面胶带:1卷; Ø 场地组装手册:1份; Ø 安装工具:螺丝、螺丝刀等 |
|
| 6 | 群体智能决策软件系统 | 软件 |
群体智能决策软件系统可以根据研究课题需要完成相应的追捕实验、围捕实验、协同逃生实验等,为了更好的配合学校完成各种实验,智能佳为其提供三种基础的协同实验案例和代码: 1. 图形模式:根据E-PUCK2数量不同,可以自适应组合完成如圆形、三角形、五角星形、正方形等形状; 2. 手绘模式:可以实时根据研究人员在触摸屏上绘制图案,并匹配E-PUCK2的数量和位置信息,完成相应图形或文字组合; 3. 随动模式:研究人员通过定位指挥棒控制多台E-PUCK2列队跟随其运动。 3.软件提供服务: 1) 提供整套系统二次开发代码; 2) 提供速度、角度、位置控制接口; 3) 提供3D仿真软件培训; 4) 提供一次2天免费上门培训服务; |
十、 群体智能软件案例
| 编号 | 概要 | 内容 | 展示方式 |
| 1 | 案例模式 | 提供三种群体智能控制模式,分别为图形模式、手绘模式、随动模式 |
 |
| 2 | 图形模式 | 根据E-PUCK2数量不同,可以自适应组合完成如圆形、三角形、五角星形、正方形等形状; |
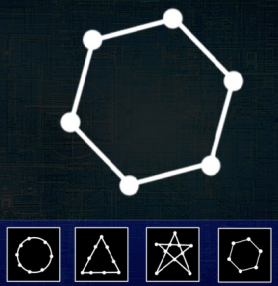 |
| 3 | 手绘模式 | 可以实时根据研究人员在触摸屏上绘制图案,根据计算E-PUCK2的数量和位置信息,完成相应图形或文字组合; |
 |
| 4 | 随动模式 | 研究人员通过定位指挥棒控制多台E-PUCK2列队跟随其运动。 |
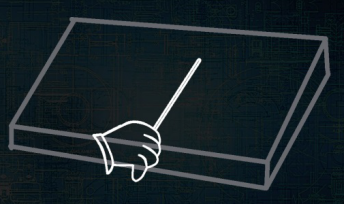 |
| 5 | 底层代码 | 提供底层代码,方便学校展开更高级别的研究,例如追捕实验、围捕实验、编队实验、一致性实验、聚散实验等多智能体协同控制算法。 | |
十一、 多智能体实验室效果图
11.1 群体智能实验平台效果图

图2-产品效果图
11.2 群体智能实验平台三视图
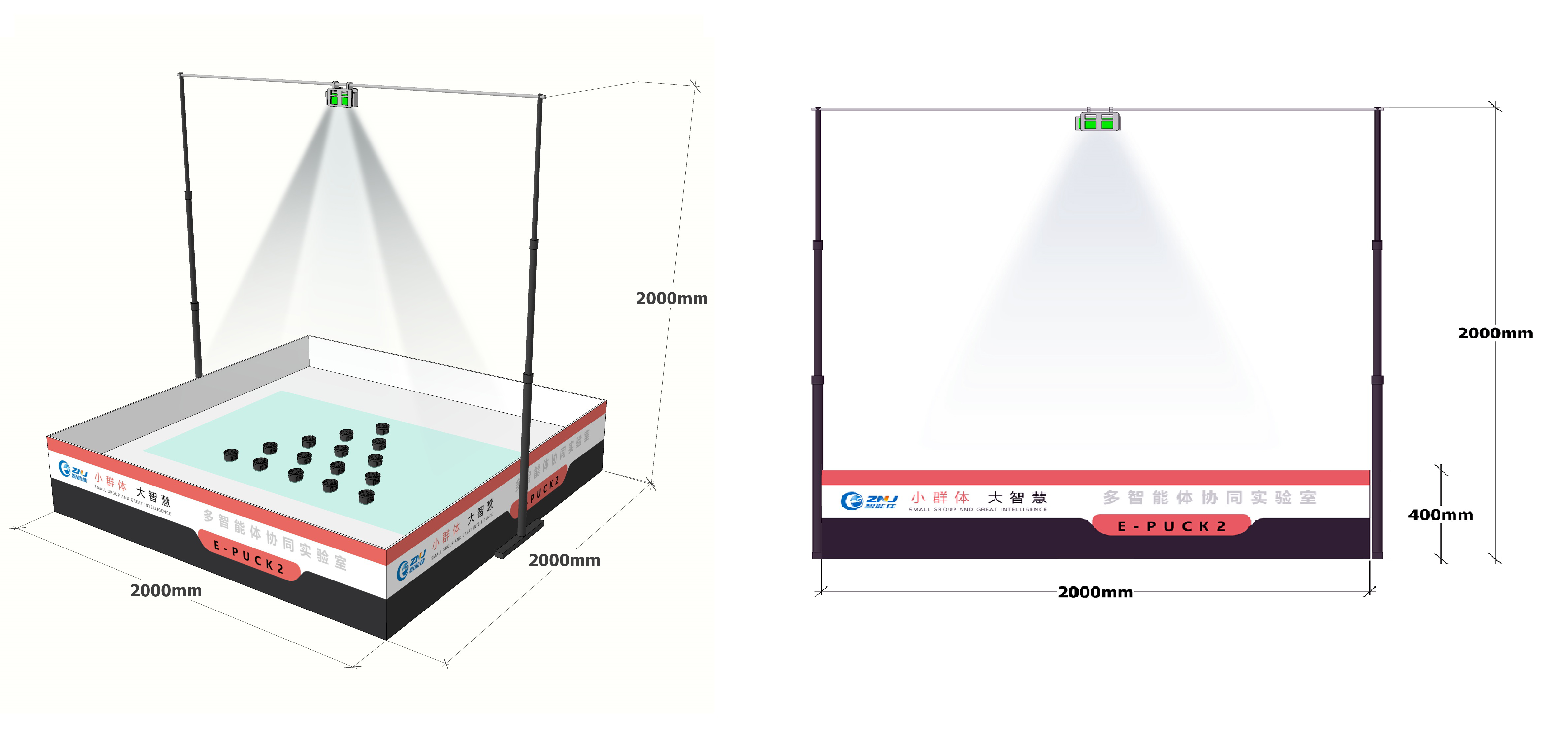
图3-产品三视图
11.3 实验室整体效果图

11.4 群体智能实验室刨面图

11.5 多智能体协同效果图

11.6 多智能体协同效果图


